ROS安装
ROS的介绍
ROS 是机器人操作系统(Robot Operating System)的英文缩写,虽然叫做操作系统,但并不是真正意义上的操作系统,而是一个面向机器人的开源的开发平台。
它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。
开始安装:配置公钥
公钥是 Ubuntu 系统的一种安全机制,配置公钥让系统信任。
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
系统更新
更新系统,确保自己的Debian软件包和索引是最新的。
sudo apt-get update安装ROS
大家注意自己的 Ubuntu 版本,我的是 20.04 对应的是 ROS 版本是 noetic
大家也可以根据自己的 Ubuntu 版本去百度自己的对应的 ROS 版本
ROS安装
环境变量设置
这里容易出错,大家直接复制粘贴就好
注意对应自己的版本修改目录名
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装 rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
测试ROS
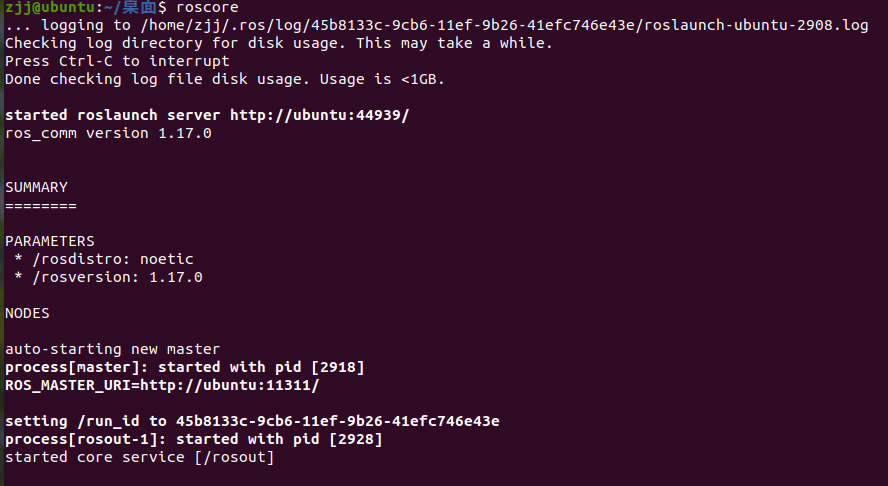
打开第一个终端窗口,运行 roscore
roscoreroscore
出现如下图的情况,就证明运行成功
打开第二个终端窗口,输入:
rosrun turtlesim turtlesim_node当出现有一个海龟的窗口,证明运行成功了

打开第三个终端窗口,输入:
rosrun turtlesim turtle_teleop_key
出现这样的提示后,我们用鼠标聚焦第三个终端窗口,便可以通过按下 ↑ ↓ ← →键来对小海龟进行控制了
安装完成
到了这里,恭喜你已经完成了ROS的安装、配置且运行。
祝你日后的 ROS 学习也更加畅通无阻!
官网地址 :noetic/Installation/Ubuntu – ROS Wiki
csdn:在 Ubuntu 20.04 安装 ROS 的详细教程
Ubuntu配置镜像源:ubuntu 20.04 设置国内镜像源(阿里源、清华源)_ubuntu 20.04 镜像源-CSDN博客
